Our service robots employ distributed systems with multiple clients sharing information over network. These clients host numerous software components written in different programming languages.
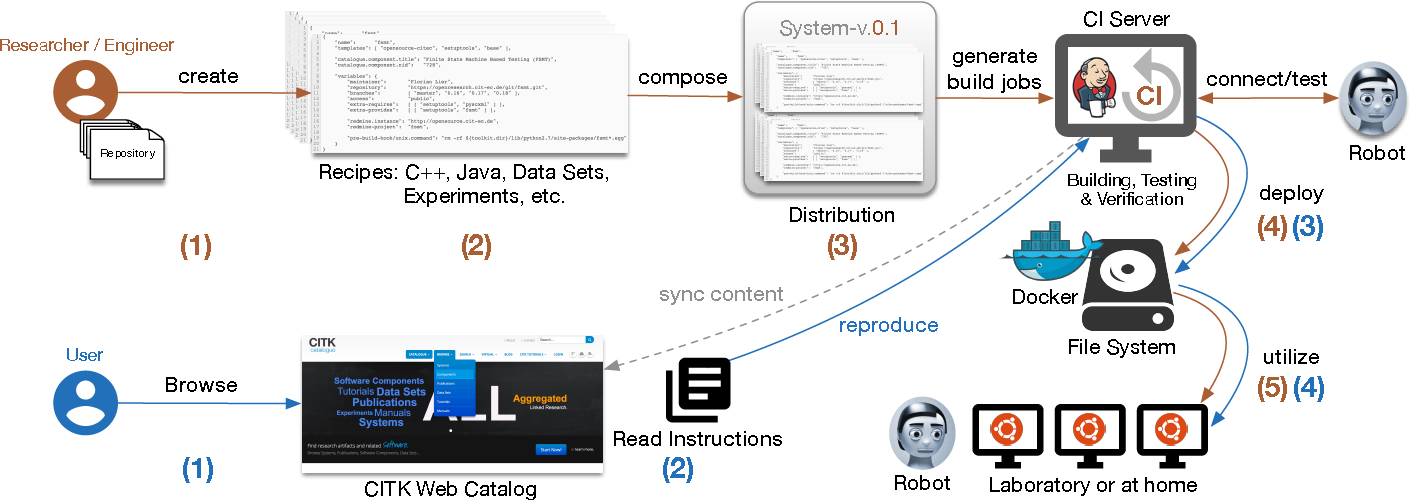
We provide a full specification of the system in our online catalog platform
Reuseable Behavior Modeling
For modeling the robot behavior in a flexible manner ToBI uses the BonSAI framework. It is a domain-specific library that builds up on the concept of sensors and actuators that allow the linking of perception to action.
Development and Deployment Tool-Chain
The software dependencies — from operating system dependencies to intercomponent relations — are completely modeled in the description of a system distribution which consists of a collection of so called recipes. In order to foster reproducibility, traceability, and potential software (component) re-use of the ToBI system, we provide a full specification of the different systems in our online catalog platform.
Object Recognition and Manipulation
Our current object recognition is based on YoloX. We augment the 2D recognition results with different 6D Pose Estimation methods.
For manipulation ToBi utilizes the Task Constructor Framework for MoveIt!, which provides a way to solve manipulation tasks by defining multiple interdependent subtasks.





